Tujuan Project Simulasi Robot
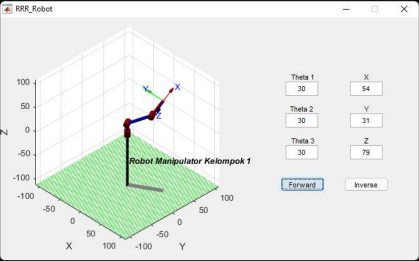
Membuat simulasi robot manipulator dengan tipe robot industri tiga lengan revolute (RRR) menggunakan aplikasi matlab
Deskripsi Project Simulasi Robot
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan. Pada proyek ini, Tim melakukan pensimulasian lengan robot tipe industri RRR (Revolute). Dalam pembuatan proyek, program menggunakan Matlab GUI sebagai aplikasi simulasinya dan menggunakan Peter Coke Robotics Toolbox sebagai Add Ons Tambahan. Proyek ini menggunakan perhitungan Kinematika maju (Forward Kinematics) untuk menentukan posisi ujung manipulator dan Kinematika Balik (Inverse Kinematics) untuk menentukan variabel joint.
Tim Project
| Bagian | Nama Anggota |
|---|---|
| Ketua (Program dan Laporan) | Nurfadhilah Septiandi Harhari |
| Materi dan Perhitungan | Andre Fatiha JunaennI Januarizcha |
Screenshoot